
No has iniciado sesión Regístrate Inicia Sesión
El modelo de Chaffin
Cómo citar este documento:
Diego-Mas, Jose Antonio. Análisis biomecánico estático coplanar. Ergonautas, Universidad Politécnica de Valencia, 2015. [consulta24-04-2025]. Disponible online: https://www.ergonautas.upv.es/metodos/biomecanica/biomecanica-ayuda.php
Las lesiones músculo-esqueléticas debidas a la carga física suelen tener un origen común: la sobrecarga de estructuras corporales (articulaciones, tendones y vainas tendinosas, ligamentos, músculos, etc.) debido a niveles repetidos y/o excesivos de esfuerzos en posturas inadecuadas. Aunque muchos métodos de evaluación ergonómica abordan la cuestión de valorar el nivel de riesgo de la realización de esfuerzos, es la aplicación de procedimientos propios de la biomecánica los que permitirán una evaluación más detallada y específica del riesgo.
Recuerda...
La causa más común de las lesiones músculo-esqueléticas es la sobrecarga de estructuras del aparato locomotor debido a niveles repetidos y/o excesivos de esfuerzos en posturas inadecuadas
Evaluar si un esfuerzo en una determinada postura puede provocar sobrecarga en alguna estructura del aparato locomotor es una tarea compleja. La biomecánica aborda dicha tarea estableciendo una analogía entre el cuerpo humano y una máquina compuesta de palancas y poleas. Así, puede considerarse que una articulación es el punto de apoyo de una palanca (un hueso largo) accionada por un músculo (la potencia), para vencer una resistencia (el peso propio de los miembros y la carga sostenida) (Figura 1). Al establecer esta analogía es posible aplicar las leyes físicas para determinar si existen sobrecargas articulares durante la ejecución de un esfuerzo.
El esfuerzo al que se somete a la articulación es, por una parte, el debido al mantenimiento del peso de los miembros del cuerpo y de la carga, y por otra, el momento que dichas fuerzas provocan sobre la articulación y que debe ser vencido para mantener la postura. Conociendo que el momento de una fuerza respecto a un punto es el producto vectorial del vector fuerza por el vector distancia desde el punto al punto de aplicación de la fuerza y aplicando las ecuaciones de equilibrio, es posible determinar el momento y la fuerza de reacción en la articulación.
En la Figura 2 se pone como ejemplo la articulación del codo. Las cargas soportadas por el codo son: el peso de carga sostenida por la mano (C) y el peso propio del antebrazo y la mano (Pp) aplicado en el centro de gravedad del miembro. Suponiendo que la posición se mantienen estática, en el codo deben aparecer una reacción que contrarreste dichas cargas (Rc) y un momento (Mc) igual en módulo y signo contrario al provocado por Pp y C. Aplicando las leyes de equilibrio puede conocerse el valor de Mc y Rc:
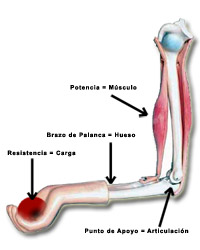
Figura 1:
Analogía miembro - palanca.
Rc = C + Pp
Mc = C x OP x cos(α) + Pp x OCdg x cos(α)
Una vez conocidos Mc y Rc será necesario determinar si los valores que adoptan pueden resultar perjudiciales para la articulación estudiada. Este procedimiento puede repetirse para cada una de las articulaciones, determinado, de esta forma, si el esfuerzo realizado puede resultar perjudicial para alguna de ellas. Para ello es necesario conocer cuál es el valor máximo recomendable de Mc para cada articulación.
En el ejemplo de la Figura 2, el momento Mc contrarresta el momento creado en el codo por la carga (C) y el peso de la mano y el antebrazo (Pp). El momento Mc en el codo es generado por los músculos flexores que se encuentran en el segmento brazo: bíceps, músculo braquial y braquirradial. La contracción de este paquete muscular genera una fuerza (Fm) a través del tendón que lo une al hueso Radio, y es dicha fuerza la que genera el momento Mc. Así pues puede plantearse que:
Mc = Fm x IO x cos(α)
siendo I el punto de inserción del tendón en el hueso, y estimándose habitualmente la distancia entre I y O como 5 cm cuando el brazo y el antebrazo forman 90º. El valor máximo de Mc será aquél correspondiente a la máxima capacidad de contracción del paquete muscular. La fuerza máxima de una contracción en un músculo, trabajando con la longitud normal, es de unos 8,5 kg/cm2 (aproximadamente). Un bíceps tiene una superficie de corte transversal de unos 16 cm2, por lo que la fuerza máxima de contracción será de aproximadamente 136 kg. Cuando el ángulo formado entre brazo y antebrazo es de 90°, la inserción del bíceps está a unos 5 cm por delante del eje de rotación de la articulación, por lo que Mc podrá adoptar un valor máximo teórico de 66,7 N*m. Si se estima la longitud total de la palanca en unos 35 cm. se obtiene que la carga máxima que deberá levantarse es 19,5 kg.
Recuerda...
El esfuerzo al que se somete a una articulación es, por una parte, el debido al mantenimiento del peso de los miembros del cuerpo y de la carga, y por otra, el momento que dichas fuerzas provocan sobre la articulación y que debe ser vencido para mantener la postura.
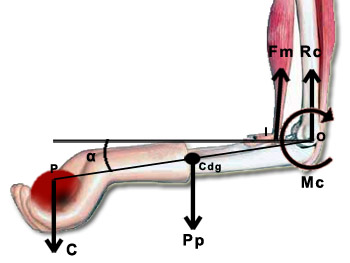
Figura 2:
Esquema de momentos y cargas en el codo.
Sin embargo, el procedimiento planteado es, en la realidad, bastante más complejo. El análisis se complica en la medida en que tengamos que considerar articulaciones más alejadas de la mano, ya que ésta se toma como el origen de la secuencia de cálculo, en especial cuando se quiere analizar la articulación lumbar (L5/S1). Para ser operativo deben resolverse ciertos problemas y asumirse ciertas simplificaciones. Por ejemplo, no todos los músculos tienen la misma función ni su disposición espacial es idéntica. Además, los esfuerzos están condicionados no sólo a las cargas, sino también a la disposición muscular. Por otro lado, cuando varía el grado de estiramiento de un músculo varía su capacidad de producir fuerza, y durante el movimiento suele existir una modificación del ángulo que forma el brazo de palanca respecto a la acción de su propia fuerza. A esto hay que añadir el hecho de que, incluso para personas con la misma constitución física, la capacidad muscular puede variar considerablemente. Por último, otro problema añadido es la necesidad de conocer la longitud, el peso y la posición del centro de gravedad de cada uno de los segmentos corporales.
Aunque es factible desarrollar aplicaciones similares a la expuesta para la valoración de los esfuerzos en cada articulación (el procedimiento es el mismo, siguiendo etapa tras etapa, en función de la articulación que se desea analizar) resulta un procedimiento complejo. Para simplificar el análisis puede disponerse de modelos matemáticos que simplifiquen los cálculos antes expuestos.
En primer lugar debe adoptarse un modelo humano en el que se determine el número de segmentos que lo componen, la localización del centro de gravedad y el peso de cada segmento. A este conjunto de datos se le denomina parámetros inerciales del modelo humano. La segmentación del cuerpo puede realizarse de múltiples formas dependiendo de cuál sea el objeto de estudio, aunque habitualmente se utilizan 14 segmentos que se presuponen no deformables (Cabeza+cuello, Tronco, Muslos, Piernas, Pies, Brazos, Antebrazos y Manos). Para la determinación de un segmento corporal son imprescindibles dos puntos que definan su eje longitudinal, que habitualmente se corresponden con los extremos de dicho eje: el punto proximal (inicio del segmento) y punto distal (final del segmento).
Existen modificaciones o adaptaciones sobre este modelo básico. Los más comunes son: dividir el tronco en dos, tres o más segmentos (tórax, abdomen y pelvis), siendo éste el modelo desarrollado inicialmente por Dempster (1955) y Plagenhoef (1962, 1971), o simplificar el modelo reduciendo el número de segmentos, lo que implica asumir que determinadas articulaciones se comportan de forma rígida, perdiéndose la movilidad entre ellas.
El modelo empleado en el presente caso (Figura 3) presenta 16 segmentos, habiéndose dividido el tronco en tórax y pelvis, y ésta a su vez en dos segmentos que comienzan en el espacio intervertebral L5/S1 y finalizan en las caderas.
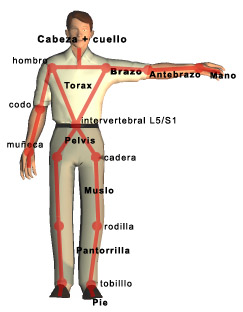
Figura 3:
Segmentos del modelo humano.
El estudio del peso y la posición del centro de gravedad de cada uno de los segmentos corporales se ha abordado mediante técnicas experimentales, ya que dependen de la cantidad de materia que tienen los segmentos y de su distribución espacial, algo que es individual y particular de cada persona.
Aunque algunos autores han tratado de obtener parámetros inerciales individualizados para cada persona (Whitsett, 1963; Hanavan, 1964; Jensen, 1978; Hatze, 1980 y Yeadon 1990), los procedimientos para obtenerlos resultan poco precisos y costosos. Por ello, lo más habitual es expresar el peso de cada segmento como un porcentaje del peso total del individuo. Existen diversos modelos de este estilo. El más habitualmente empleado es el procedente de los estudios de Dempster (1955) y Clauser (1969), que obtuvieron los datos del desmembramiento de cadáveres (Tabla 1).
Recuerda...
Un Modelo Humano determina el número de segmentos que lo componen, la localización del centro de gravedad y el peso de cada segmento. A este conjunto de datos se le denomina parámetros inerciales del Modelo Humano.
| SEGMENTO | MASA | CG | Punto proximal | Punto distal |
|---|---|---|---|---|
| Cabeza y cuello | 7.3% | 46.40% | vertex | gonion medio |
| Tronco | 50.7% | 38.03% | hueco supraesternal | cadera media |
| Brazo | 2.6% | 51.30% | acromion | radiale |
| Antebrazo | 1.6% | 38.96% | radiale | art.muñeca |
| Mano | 0.7% | 82.00% | art.muñeca | estiloides 3ºdedo |
| Muslo | 10.3% | 37.19% | art.cadera | tibiale |
| Pantorrilla | 4.3% | 37.05% | tibiale | art.tobillo |
| Pie | 1.5% | 44.90% | talón | dedo 1º |
En la Tabla 1 la columna MASA indica la masa del segmento en porcentaje respecto a la masa total del sujeto. La columna CG indica el porcentaje, respecto a la longitud total del segmento correspondiente, al que se encuentra el centro de gravedad del segmento medido desde el punto proximal.
Otros estudios, como los de Drillis y Contini (1966) permiten realizar una estimación de la longitud de los diferentes segmentos corporales en función de la estatura del individuo (Tabla 2). Puede emplearse cuando se desconocen dichos valores y su medición directa es imposible. Los datos de la longitud de los segmentos fueron obtenidos mediante mediciones sobre sujetos vivos, llevando a cabo una regresión estadística respecto a la variable estatura. De esta forma se obtuvieron las dimensiones de cada segmento como una proporción de la estatura del individuo. En general se encontraron correlaciones con r2>0.5, excepto en el caso de la longitud del pie y de la longitud de la mano en los que r2<0.5. Debe recordarse que los valores obtenidos son estimados, y que en cualquier caso es preferible la medición directa de las longitudes. No obstante, el empleo de las correlaciones entre la estatura y las longitudes de los segmentos corporales provoca un error estándar inferior a un centímetro. Es decir, en el 95% de las ocasiones, la longitud real y la estimada diferirán en menos de 2 centímetros.
Así, puede estimarse que un individuo cuyo peso fuera 75 kilogramos y cuya estatura fuese 175 cm., tendría un antebrazo cuyo peso sería 1,2 kilos (75*0.016), con una longitud de 25,55 cm. (175*0.146) y cuyo centro de gravedad se encontraría a 9.95 cm. del radiale.
SEGMENTO % ESTATURA Mano 10.8% Torax 28.8% Brazo 18.6% Antebrazo 14.6% Pelvis 4.5% Muslo 20.0% Pantorrilla y pie 28.5% Tabla 2:
Estimación de la longitud de los segmentos corporales.
Determinado el modelo humano y la forma de obtener los parámetros inerciales se está en disposición de calcular los momentos generados por la carga y el peso propio de los diferentes segmentos corporales en cada articulación y evaluar el riesgo de producir algún tipo de lesión músculo-esquelética. Esta evaluación consiste en comparar los momentos generados con los momentos máximos permisibles.
Como ya se ha indicado, con el movimiento varía el grado de estiramiento muscular, y con ello la capacidad de los músculos de producir fuerza. Por otro lado, también suele existir una modificación del ángulo que forma el brazo de palanca respecto a la acción de la propia fuerza; por ello, el valor de este brazo de palanca también varía.
Existen estudios que determinan las fuerzas musculares máximas en función de las posturas y tipos de movimientos, y, consecuentemente, permiten deducir los momentos máximos en cada caso. En esencia y para evitar cualquier tipo de lesión, cuando alguien intenta tirar, empujar o levantar una carga con el máximo esfuerzo, los momentos generados por la aplicación de la carga y el propio peso deberían ser de menor o igual magnitud que los momentos que son capaces de generar los músculos implicados en el movimiento.
Basándose en el hecho de que en cada articulación existe un momento de fuerza muscular medible que no debe ser superado por los momentos generados por cargas externas, se puede generar un modelo biomecánico capaz de predecir el máximo esfuerzo permitido en cada articulación en función del tipo de movimiento. Uno de los primeros modelos fue desarrollado por Chaffin (1969). Se trata de un modelo estático y coplanar (plano sagital) para el estudio de movimientos implicados en el manejo de cargas. Este modelo, haciendo referencia a la limitación del par de fuerza del músculo, establece que debe cumplirse que:
- Sj < Mj/L < Sj
donde:
-Sj es el momento máximo que puede producirse en la articulación j cuando actúan los músculos extensores.
Sj es el momento máximo que puede producirse en la articulación j cuando actúan los músculos flectores.
Mj/L es el momento que actúa en cada articulación j debido a la carga externa L sostenida y al peso de los segmentos corporales que sostiene dicha articulación j.
Anteriormente se ha indicado cómo calcular Mj/L para cada articulación aplicando las ecuaciones de equilibrio. Para calcular Sj y -Sj se requiere la realización de pruebas con distintos tipos de sujetos. La estimación requiere tener en cuenta multitud de factores, entre los que destacan: la postura, la constitución física del operario, el tiempo, y la longitud del movimiento (a mayor longitud, menor momento). Teniendo en cuenta estos factores y siguiendo el método adecuado pueden obtenerse unos valores máximos que sirven de patrón. Un estudio de este estilo fue realizado por Stobbe en 1982. Como ya se ha mencionado, los momentos de fuerza de los músculos varían según el rango de giro de la articulación. Por tanto, se deben conocer los ángulos entre segmentos para poder calcular Sj y -Sj. En el modelo empleado en este caso los ángulos deben medirse tal y como muestra la Figura 4.
Estudios de Clarke (1966), Schanne (1972) y Burggraaf (1972) determinaron los valores de Sj y -Sj. Los datos se tomaron a partir de una muestra de sujetos en edad escolar de ambos sexos, por lo que no se pueden considerar representativos de la población industrial. Por ese motivo, en Chaffin (1999) se utilizan los datos obtenidos por Stobbe (1982), extraídos de trabajadores y trabajadoras de la industria, para ajustar los valores de la media previstos y estimar un coeficiente de variación alrededor de la misma.
Recuerda...
Un Análisis Biomecánico consiste en comparar los momentos generados en las articulaciones en una determinada postura con una determinada carga con los momentos máximos permisibles en esas condiciones.
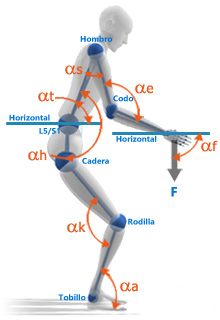
Figura 4:
Medición de ángulos entre segmentos.
En la Tabla 3 se muestran algunas de las ecuaciones propuestas por Chaffin para el cálculo de Sj y -Sj.
| Esfuerzo | Articulación Primaria y Adyacente | Sj* (Nm) | G (Ajuste por sexo) | Coeficiente de variación | ||
|---|---|---|---|---|---|---|
| Hombre | Mujer | Hombre | Mujer | |||
| Flexión de codo | Codo/Hombro | Se=[336.29 + 1.544αe-0.0085 αe2 -0.5αs][G] | 0.1913 | 0.1005 | 0.2458 | 0.2629 |
| Extensión de codo | Codo/Hombro | -Se=[264.153 -0.575αe-0.425αs][G] | 0.2126 | 0.1153 | 0.2013 | 0.3227 |
| Flexión de hombro | Hombro/Codo | Sh=[227.338+ 0.525αe -0.296αs][G] | 0.2845 | 0.1495 | 0.2311 | 0.2634 |
| Extensión de hombro | Hombro | -Sh=[204.562- 0.099αs][G] | 0.4957 | 0.2485 | 0.3132 | 0.3820 |
| . | . | . | . | . | . | . |
| . | . | . | . | . | . | . |
Suponiendo que se desea conocer el momento máximo al que puede someterse el codo en la postura reflejada en la Figura 1, habrá de determinarse si los paquetes musculares activos son los flectores o los extensores. Mantener el antebrazo en la postura de dicha figura requiere la actuación de los músculos bíceps, braquial y braquirradial, es decir, los músculos flectores del antebrazo. Así pues se trata de una Flexión de Codo. En la primera fila de la Tabla 3 puede observarse que las articulaciones primaria y adyacente para Flexión de Codo son el Codo y el Hombro, por lo que habrá que determinar los ángulos αe y αs en grados sexagesimales tal y como se muestra en la Figura 4. El valor de dichos ángulos se introduce en la ecuación correspondiente:
Se=[336.29 + 1.544αe-0.0085 αe2 -0.5αs][G]
junto con el correspondiente a G, que tratándose de un hombre tomará el valor 0.1913 según la tabla 3. Considerando que αe =90º y αs =0º se obtiene que Se = 77.74 Nm.
Así pues, el momento máximo a no sobrepasar en el codo, en la postura analizada, para un sujeto de la estatura y peso dados, será de 77.74 Nm. Sin embargo, no todos los individuos de la misma complexión compartirán el mismo límite. El valor calculado es el Se medio, es decir, el límite máximo para el 50 % de los individuos de dichas características. Suponiendo que dicho límite se distribuye según una distribución normal, el Se calculado será la media de dicha distribución. Para estimar la desviación típica (SD) se multiplica el Coeficiente de Variación (última columna de la Tabla 3) por dicho valor medio (hay que recordar que ± 1 SD = 68% de la población y ± 2 SD = 95 %, suponiendo una distribución normal de los datos).
Conocida la media y la desviación típica de la distribución de momentos máximos, es posible determinar el porcentaje de población protegida cuando se sostiene una determinada carga, o la carga máxima a sostener para que resulte protegido un determinado porcentaje de la población.
Por otra parte, el valor calculado es el máximo recomendable para posturas y esfuerzos puntuales de corta duración. Este valor deberá ser disminuido si los esfuerzos son realizados durante tiempos prolongados o con frecuencia. Los límites recomendados dependerán de la duración de la acción y de su repetitividad. En función de la repetitividad de la acción los esfuerzos se clasificarán en:
Esfuerzo estático (mantenido más de un minuto)
Esfuerzos que se repiten cíclicamente (más de una vez cada 5 minutos)
Esfuerzos que se repite con una frecuencia inferior a una vez cada 5 minutos
La tabla muestra el porcentaje de la carga máxima soportable que no es recomendable sobrepasar en función de la repetitividad y la duración
Recuerda...
El valor calculado es el máximo recomendable para posturas y esfuerzos puntuales de corta duración. Este valor deberá ser disminuido si los esfuerzos son realizados durante tiempos prolongados o con frecuencia. Los límites recomendados dependerán de la duración de la acción y de su repetitividad.
Repetitividad Duración <= 1 hora > 1 hora Esfuerzo estático 5% 2% Esfuerzos que se repiten cíclicamente más de una vez cada 5 minutos 14% 10% Esfuerzos con una frecuencia inferior a una vez cada 5 minutos 70% 50% Tabla 4
Porcentaje de la carga máxima recomendable en función de la repetitividad y la duración.
La aplicación del modelo descrito para la evaluación de esfuerzos en las diferentes articulaciones es un procedimiento que puede resultar complejo sin el apoyo de una herramienta informática. La herramienta de cálculo ofrecida en Ergonautas permite realizar los cálculos físicos y la aplicación del modelo a partir de los datos de entrada, proporcionando como resultados: el nivel de esfuerzo en cada articulación, la carga máxima recomendable, el porcentaje de población protegida, además de la estabilidad de la postura, la posibilidad de deslizamiento y la de vuelco del trabajador bajo las cargas soportadas.
Para proceder al cálculo deben recogerse una serie de datos sobre la tarea:
Sexo del trabajador.
Estatura.
Peso.
Ángulos de los segmentos corporales en la postura analizada.
Peso de la carga sostenida o fuerza ejercida.
Si la carga se sostiene con una o dos manos.
Tiempo durante el cual se realizan los esfuerzos.
Frecuencia de los esfuerzos.
Además, si se desea calcular la posibilidad de deslizamiento del trabajador por la postura adoptada y carga sostenida, deberá conocerse el coeficiente de rozamiento entre el calzado y el suelo.
A partir de estos datos el software calculará la tensión y los momentos generados en cada articulación y los comparará con los máximos permisibles en dicha postura obtenidos del modelo antes expuesto, modificados en función de la duración y frecuencia del esfuerzo, y del porcentaje de población a la que se desee proteger. A partir de la diferencia entre el momento actuante y el permisible en cada articulación el programa determinará el riesgo existente.

Figura 5:
Resultados del método.
Antes de aplicar el método resulta de especial relevancia conocer las simplificaciones asumidas en su desarrollo y las limitaciones de su aplicación. Como se ha indicado en los apartados precedentes, se asumen modelos que permiten estimar aspectos como la longitud de los segmentos corporales, su peso, la posición de su centro de gravedad, la posición de los diferentes segmentos a partir de ciertas mediciones angulares, los momento máximos soportables por las articulaciones así como su distribución alrededor de la media, etc. Aunque todos estos modelos han sido refrendados y validados en la literatura científica al respecto, y su uso está asentado y difundido entre la comunidad científica, no dejan de resultar estimaciones de la realidad. El hecho de que, por ejemplo, en el el 95% de las ocasiones la longitud real y la estimada de un segmento corporal difieran en menos de 2 centímetros, no implica que exista un cierto margen de error.
Respecto a los cálculos físicos se ha asumido que:
Todos los segmentos corporales son rígidos, sin cambios en su masa, densidad o forma en función de la postura.
Los centros de masas de los segmentos no cambian de posición relativa a los extremos proximal ni distal del segmento.
El radio de giro de cada segmento no cambia durante el movimiento.
El punto de aplicación de la carga está situado en el centro de la palma de la mano.
La carga no genera momentos en el cuerpo.
Ninguna parte del cuerpo está apoyada. El operario se sostiene únicamente mediante los pies sobre el suelo.
Si la carga es soportada por una sola mano se considerará que el brazo que no actúa en el levantamiento adopta la misma postura que el que ejerce la fuerza.
Por último, es necesario recordar que el modelo asumido valora esfuerzos isométricos, estáticos y coplanares (plano sagital) en dos dimensiones. Dado que se trata de un modelo estático, resulta una herramienta especialmente útil para el diseño y evaluación de esfuerzos en dos dimensiones en los que el efecto de la aceleración de la carga y los segmentos corporales es despreciable. En el análisis de movimientos de manejo de cargas pesadas de forma lenta puede aplicarse describiendo la actividad como una serie de posturas estáticas analizadas por separado, asumiendo en cualquier caso que los efectos de inercia provocados por la aceleración sean despreciables.
La no consideración de estas simplificaciones y limitaciones puede derivar en la obtención de resultados erróneos.
Chaffin, d.b., Anderson, g.b.j. Y bernard, j.m., 2006, Occupational Biomechanics (4ª Edición). John Wiley & Sons. Hoboken, New Jersey.
Chandler,R.F.; Clauser,C.E.; McConville,J.T.; Reynolds,H.M. Y Young,J.W.,1975. Investigation of inertial porperties of the human body. AMRL-TR-74-137, AD-A016-485, DOT-HS-801-430. Aerospace Medical Research Laboratories, Wright-Patterson Air Force Base, Ohio.
Clauser,C.E.; McConville,J.T. Y Young,J.W., 1969. Weight, volume and center of mass of segments of the human body. AMRL-TR-69-70. Aerospace Medical Research Laboratory, Wright-Patterson Air Force Base, Ohio.
Dempster,W.T., 1955. Space requirements of the seated operator. WADC-55-159, AD-087-892. Wright-Patterson Air Force Base, Ohio.
Diego-Mas, J.A., Poveda-Bautista, R. y Garzon-Leal, D.C., 2015. Influences on the use of observational methods by practitioners when identifying risk factors in physical work. Ergonomics, 58(10), pp. 1660-70.
Drillis,R.J. Y Contini,R.,1966. Body segment parameters. BP174-945, Tech.Rep. Nº 1166.03, School of engineering and science, New York University, New York
Garg, A, Chaffin, D.C. y Herrin, G.D.,1978, Prediction of metabolic rates for manual material handling jobs, American Industrial Hygiene Association Journal, 39, pp. 661-764.
Niosh,1981, Work practices guide for manual lifting. NIOSH Technical Report nº 81-122, National Institute for Occupational Safety and Health
Roebuck, J.A., Kroemer K.H.E. & Thomsnon W. G., 1975, Engineering anthropometry methods. Wiley-Interscience, New York.
Waters, T.R., Putz-Anderson, V. Y Garg, A, 1994, Applications manual for the revised Niosh lifting equation. National Institute for Occupational Safety and Health. Cincinnaty. Ohio
Diego-Mas, Jose Antonio. Análisis biomecánico estático coplanar. Ergonautas, Universidad Politécnica de Valencia, 2015. Disponible online: https://www.ergonautas.upv.es/metodos/biomecanica/biomecanica-ayuda.php

Ergoniza